Porting
Contiki to the LPC2148 Education Board
Final project in Embedded Systems
course at
Yair Hershkovitz <yairhr@gmail.com>
Demitry Lev <demitryl@post.tau.ac.il>
1. Introduction:
Contiki is an open source, highly
portable, multi-tasking operating system for memory-efficient networked
embedded systems and wireless sensor networks.
The goal of this project is to have the LPC2148
Education Board operated and controlled by Contiki. The project includes
integration with the Contiki Makefile system, creating the linker scripts and
startup code for the LPC2148 board, and implementing the standard Contiki
primitives and the standard LPC2148 board interfaces.
2. Makefile System:
When compiling a Contiki program the target
platform must be defined by setting the TARGET environment variable to the
platform name (e.g. make TARGET=lpc2148edu). The Makefile system then expects
to find platform specific Makefile in the “platforms/$(TARGET)/Makefile.$(TARGET)” location. The platform Makefile must define the following variables:
·
CONTIKI_TARGET_MAIN:
The source file which implements the main Contiki event loop.
·
CONTIKI_SOURCEFILES:
All sources files which should be compiled for supporting the platform. This
list should include all relevant platform drivers in addition to the main
target.
·
CONTIKI_CPU: The
directory where the platform CPU support is found. For the LPC2148 platform
that is “cpu/lpc2148”.
The
CPU Makefile ($(CONTIKI_CPU)/Makefile.$(CPU) must also specify all the source files which
are needed for the compilation. In addition it must define the cross compiler
to use (CC, LD, AS, AR, NM, OBJCOPY, STRIP, BSL) and the compiler flags
(CFLAGS, ASFLAGS, LDFLAGS).
3. Implementation Details:
3.1. Development Tools: The following tools are used to compile and load the code to the
LPC2148 board.
·
Toolchain: GNU ARM
·
C Library: Newlib
·
Flash
programmer: lpc21isp
3.2. Linker script: For the linker script we used the script that was provided at the
beginning of the course with the next modification: We added an explicit stack
section sized 0x900b to allow enough free memory for heap allocations.
3.3. Startup code: For the startup code (CPU, Interrupts, Stacks initialization) we used
the startup code that was provided at the beginning of the course with a small
modification: Changing the IRQ stack size from 0x400b to 0x100b to allow a
bigger SYS stack of
0x700b.
3.4. Integrating with Newlib C library: The Newlib library leaves the following functions
to be implemented by the target platform:
·
_sbrk_r() – This function is in-charge of allocating data
segment memory which is then used by malloc() to dynamically allocate
memory. This function is by setting the initial segment to the stack end and
allowing it to grow until it reaches the end of memory boundary.
·
_write_r() – This function is in-charge of writing data to the
device described by the given file-descriptor. Our implementation only handles
the case when the file descriptor matches the STDOUT device. Then we simply
write the input data to the UART transmit register.
·
_fstat_r(),_close_r(),_lseek_r(),_read_r(): All
of these function are left with a stub implementation. This is satisfactory
since we currently do not use their functionality.
3.5. Contiki Interfaces:
3.5.1. Event Timers: In order to support the Contiki etimers it is enough to implement the “clock_time_t clock_time(void)” function. This function is expected to
return the number of clock ticks since boot, when clock ticks rate is
CLOCK_CONF_SECOND ticks per second. Our implementation sets CLOCK_CONF_SECOND
to 100. We choose to use the TIMER0 clock to implement this functionality. We
set the MCR to reset on every match, and MR0 to 29999 which means 100 times
each second.
3.5.2. Real-Time Timers: In order to support the Real-time timers we need to implement the “void rtimer_arch_schedule(rtimer_clock_t
t)” function. This function is expected to schedule a call to “rtimer_run_next()”
from interrupt context in ‘t’ time,
where ‘t’ is a number of ticks so that RTIMER_ARCH_SECOND ticks are a second.
Our implementation sets RTIMER_ARCH_SECOND to 65535, which is the maximum
granularity allowed by Contiki. We choose to use the TIMER1 clock to implement
this functionality. We set the MCR to reset on every match, and MR0 to
(TICKS_PER_SECOND / RTIMER_ARCH_SECOND * t) – 1. Every time the interrupt is
received the timer is disabled and we will be re-enabled by the rtimer system if required.
3.5.3. LEDs:
The LED support in Contiki assumes that there are 3 color LEDS – RED, GREEN
& BLUE. To be aligned with this assumption we choose to have the LEDs
interface to control the single RGB led on the board while each color is
controlled separately.
The LED support in Contiki requires the following functions:
·
void leds_arch_init(void): Set initial LED states ( all off)
·
unsigned
char leds_arch_get(void): Return a bit-mask of the LEDs which are on
(LEDS_RED, LEDS_GREEN and LEDS_BLUE)
·
void leds_arch_set(unsigned
char leds): Set the LEDs state according to the given bit-mask.
3.5.4. SLIP (Serial Line Internet Protocol): Contiki implements a simple SLIP stack which can be
used to operate the uIP stack over a serial port. The architecture is required
to support a “void slip_arch_writeb(unsigned char c)”
function which should output the given char to the serial port, and expected to
call the “int slip_input_byte(unsigned
char c)” when a char is received from the serial port. For supporting
this we’ve implemented an interrupt handler to be able to pass received bytes
from the serial port to the SLIP stack.
4. Further enhancements:
There is still work that needs to be done to better utilize the capabilities of
the LPC2148 Microcontroller and the interfaces of the LPC2148 Education Board.
Following is a list of items that should be further investigated:
4.1. Power Save Support: The current implementation of the Contiki event
loop uses busy polling, constantly seeking for processes to run although it is
possible that none of the processes are pending execution. We can reduce our
power consumption by using the LPC2148 power save functionalities, waking up
when the next event (either an expired timer or an interrupt) is triggered.
4.2. Watchdog Support: The LPC2148 Microcontroller has a Watchdog Timer interface which can
be used to auto-reset the board if we detected a long period of inactivity.
Contiki already include Watchdog capabilities so we can hook them together.
4.3. IRQ Interrupts: There is no real justification for using the FIQ interrupt for the
clock & UART. We should switch to using IRQs.
4.4. Buttons Support: We should support the LPC2148 Education Board buttons and joystick
using the Contiki sensors interface.
4.5. Temperature Sensor: We can support the LPC2148 Education Board
temperature sensor.
4.6. Real-Time Clock: We can use the LPC2148 Microcontroller RTC interface to support date
and time functionalities.
5. Example applications:
We have created 2 example application which demonstrates the programming the
LPC2148 with the Contiki system.
5.1. Hello World: The Hello World application demonstrates the basics of Contiki -
Processes, Timers, Real-Time Timers and LEDs support. It also demonstrates how
standard output is mapped to the serial console and also using the LCD display.
Compiling and uploading the Hello-World
application:
The Hello-World application in action:

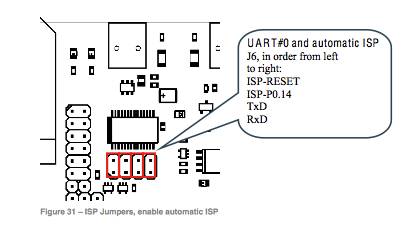
5.2. Telnet Server: The Telnet Server application is intended to demonstrate the uIPv4
stack basic capabilities. In-order to be able to test this application, after uploading
it to flash, it is needed to disable the automatic entrance to ISP mode when
opening a serial connection (Remove from J6 the ISP-RESET and ISP-P0.14 pins).
Compiling and uploading the Telnet-Server
application:
Running the SLIP driver on the host PC:
Connecting to the Telnet server:
6. Source files
The code is provided as a full
Contiki 2.3 archive which includes the LPC2148 support and as a diff file which
can be patched against the original Contiki 2.3 release:
Contiki 2.3 with LPC2148 Support
Patch for LPC2148 Support on Contiki 2.3
·
platform/lpc2148edu/Makefile.lpc2148edu – Makefile for the LPC2148 Education Board platform
·
platform/lpc2148edu/lpc2148-flash.ld – Linker Script for the LPC2148 Education Board
platform
·
platform/lpc2148edu/contiki-conf.h – Definitions of Contiki features set
·
platform/lpc2148edu/contiki-lpc2148edu-main.c – The main() application which is in-charge of platform
initialization and running the Contiki event loop
·
platform/lpc2148edu/ks0070b_lcd.c - Driver for
the KS0070B 2x16 character LCD
·
platform/lpc2148edu/lcd.c – Driver for enabling the KS00700B LCD on the
LPC2148 Education Board platform
·
platform/lpc2148edu/lcd.h - Driver for enabling the KS00700B LCD on the
LPC2148 Education Board platform
·
platform/lpc2148edu/leds-arch.c – LPC2148 Education Board support for the Contiki
LEDs API
·
cpu/lpc2148/Makefile.lpc2148 – Makefile for the LPC2148 microcontroller
·
cpu/lpc2148/interrupt.h – Interrupts setup code for the LPC2148
Microcontroller
·
cpu/lpc2148/io.h – Defines for easier handling of writing/reading LPC2148
microcontroller registers
·
cpu/lpc2148/lpc214x.h – Defines for easier handling of writing/reading LPC2148
microcontroller registers
·
cpu/lpc2148/startup.S – Startup/Bootstrap code for the LPC2148
microcontroller
·
cpu/lpc2148/lpc2148def.h – Definitions of various size variables types
·
cpu/lpc2148/fiq.c – Generic interrupt handler for FIQ interrupts
·
cpu/lpc2148/lpc2148.c – Implementation of functionalities which are required
by the newlib C library.
·
cpu/lpc2148/clock.c – LPC2148 Microcontroller support for the Contiki
clock and event timers interfaces
·
cpu/lpc2148/rtimer-arch.c – LPC2148 Microcontroller support for Contiki Real-Time
timers interface
·
cpu/lpc2148/rtimer-arch.h – LPC2148 Microcontroller support for Contiki
Real-Time timers interface
·
cpu/lpc2148/uart.c – Driver for the UART0 port on the LPC2148
Microcontroller
·
cpu/lpc2148/uart.h – Driver for the UART0 port on the LPC2148
Microcontroller
·
cpu/lpc2148/slip_uart.c – LPC2148 Microcontroller support for the Contiki
SLIP driver over the UART0 port
·
cpu/lpc2148/watchdog.c – Null support for reboot of the LPC2148
Microcontroller
·
cpu/lpc2148/mtarch.h – Null support for the Contiki Threads support
·
core/sys/rtimer.c – Bug fix in the Contiki Real-Time timers’
implementation of Timer entries which are scheduled twice – second time
immediately following the first one
·
examples/lpc2148edu/Makefile – Makefile for generating the test application for
the LPC2148 Education Board
·
examples/lpc2148edu/hello-world.c – Test application which print “Hello World” message
to the UART and to the character LCD, and uses etimers and rtimers to control
the color LED
·
examples/lpc2148edu/telnet-server.c – Test application which utilize the Contiki uIP
stack and Telnet Server application and uses the SLIP over UART0 as the uIP
network interface
·
tools/tunslip.c – Adjustments in the Contiki Linux SLIP driver to
send the data to the UART slower to be able to work with the limited
functionality of the UART0 driver implementation
7. License:
|
|